
最近一段波士顿动力机器人跑酷的一段视频发布后,火爆了整个网络,而在这时有人会问,机器人眼中的跑酷世界和人类眼中的跑酷世界是一样的吗?


其实在实际上,在机器人Atlas的大脑中确实是有一个模糊的地图“轮廓”。与此同时,Atlas还会接收许多的目标信息,比如是像在进行活动的时候在哪个时间点需要完成什么动作、在哪个时间点需要避开什么障碍物等等。但是与精确的感知地图相比,机器人眼中的这个地图并不会精确到路线轮廓和障碍物之间的距离,取而代之的是用感知算法去“看”。
Atlas通过感知算法可以实时规划出自己将要行走的路线,同时还将会根据所要遇到的障碍物的距离进行提前的调整。比如说当Atlas感知即将会遇到一个盒子时,它就会要做出一个跳上去的动作,但是如果这个盒子与它有一定的距离,它还会再正确找到盒子的位置后再进行跳跃。


 中国移动
中国移动 ROBAM老板
ROBAM老板 飞利浦
飞利浦 苏泊尔
苏泊尔 西门子
西门子 海尔
海尔 格力
格力 美的
美的 华北工控
华北工控 三星
三星 HTC Vive
HTC Vive 索尼
索尼 Oculus Rift
Oculus Rift 科大讯飞
科大讯飞 英特尔
英特尔 iPhone
iPhone IBM
IBM Facebook
Facebook 微软
微软 亚马逊
亚马逊 google谷歌
google谷歌 戴VR眼镜的
戴VR眼镜的 人工智能
人工智能 2018中国电博会 深圳市汇春科技股份有限公司
2018中国电博会 深圳市汇春科技股份有限公司 Pico U VR眼镜
Pico U VR眼镜 小8 VR自助体验机
小8 VR自助体验机 荣耀VR眼镜
荣耀VR眼镜 SeeX天使之眼
SeeX天使之眼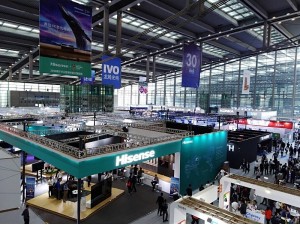 中国智能制造网带你直击2018第六届电博会
中国智能制造网带你直击2018第六届电博会


