


为了提高生产效率,方便下料,注塑成型后需要相应的下料装置。下料装置主要由自动控制机械手实现。在潜水手机壳的生产过程中,当胶片放入潜水手机壳的摄像孔中时,在胶片周围浇注一层压板将胶片压紧,防止胶片从潜水手机壳上掉下来,在操作过程中,机械手先伸入注塑机内部,取下带有注塑压板的潜水手机壳,再将不带注塑压板的潜水手机壳放入模具中。
现有的机械手主要包括机架,机架上设有横向滑轨,横向滑轨上的滑动连接处设有纵向滑轨,纵向滑轨上连接有垂直滑板。放置板上有几组吸盘,分别用于吸吮不明潜水手机壳和注入式潜水手机壳。在操作过程中,用以下零件吸合非注塑潜水手机壳和注塑潜水手机壳,工人手动将潜水手机壳放置在吸盘上,但放置板上只设置了多个吸盘,所以外壳在放置板上的定位精度不高,所以操作者需要很长时间才能将潜水手机外壳放在正确的位置,进给效率很低,因为如果潜水手机外壳的位置不准确,在进给过程中,潜水手机外壳无法准确放入模具内,导致送料失败。
工件交付
采用水平输送、倾斜输送、升降输送。水平输送可输送不同的货物,可采用不同的输送速度和不同的输送形式;倾斜输送可以调节倾斜角度。采用带花纹的传动带或水平挡板,提高了皮带对工件的稳定性,防止工件打滑脱落,保证了工作轨迹的准确;提升和输送占用空间小,对小型圆柱形零件效果好。
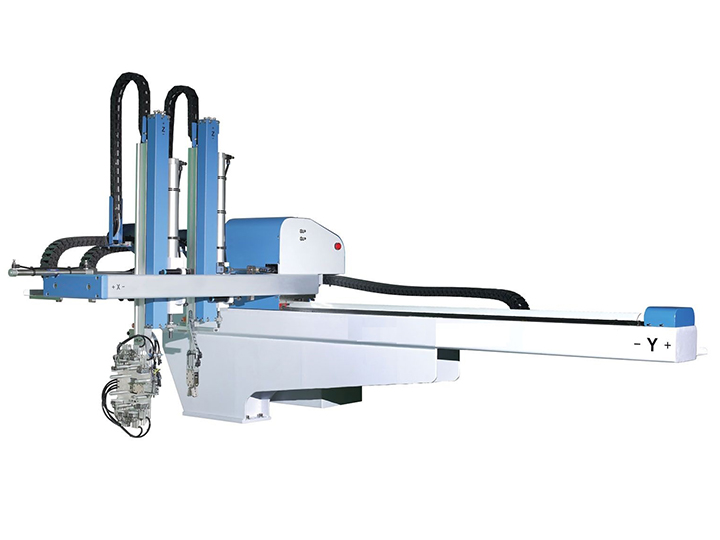
工件交付到位后,桁架机械手负责将输送线上要加工的工件送到机床上,将加工好的工件从机床上取出,放回原进给位置。动作包括:爪的开闭;升降运动;左右移动。爪由气缸驱动,升降运动和左右运动分别由伺服电机驱动。在抓取工件的过程中,必须保证爪与工件的位置和角度关系。首先调整定位爪上的基准面和工作台上相应的基准面,以减小角度误差;然后平移定位爪或料台,调整位置误差。
夹头上下料后,桁架机械手必须将加工好的工件输送到进给槽。此时,进料先于卡盘进料和卸料,物料先于卡盘进料和卸料,以保证在整个进料和卸料循环中不会有物料抓斗被卸下。

